Adam算法讲解
前言
Adam 优化算法是随机梯度下降算法的优化,近来其广泛用于深度学习应用中,尤其是计算机视觉和自然语言处理等任务,该算法是Momentum算法与RMSprop算法的结合。动量梯度下降法Momentum我们之前已经讲解过,本文将会先介绍下RMSprop算法,再讲解Adam。
RMSprop(均方根)

在图中这样的情况时,梯度下降在横轴方向前进,在纵轴方向却会有大幅度的抖动。我们把横轴代表参数$w1$,把纵轴代表参数$w2$。注意,作为例子我们此处只引入了2个参数,实际情况会复杂很多。这里我们依然会使用指数加权平均数,如果你不了解指数加权平均数,请先阅览动量梯度下降法Momentum。
这里我们最后乘的是$(dW)^2$而不是$dW$,我的理解是$dW$的值可能会出现负数,而我们更新参数时,必须保证$S_{dw1}$为正数。
计算出指数加权平均数之后,我们开始更新参数
此处的$\epsilon$是为了防止分母为0
横轴$w1$因为抖动小,所以$dW_1$的值很小,$S_{dw1}$的值很小,最终与$\alpha$相乘的值就会很大,$W1$抖动变动大,在横轴就会前进的更快。
纵轴$w2$因为抖动大,所以$dW_2$的值很大,$S_{dw1}$的值很大,最终与$\alpha$相乘的值就会很小,$w2$抖动变小,纵向的变化相对平缓。
##Adam算法 当把Momentum与RMSprop算法结合在一起时,就是Adam算法。
首先还是计算指数加权平均数,我们令$V_{dW}=0$、$V_{db}=0$、$S_{dW}=0$、$S_{db}=0$
接下来计算Momentum的指数加权平均数,注意超参数这里是$\beta_1$
再计算RMSprop的指数加权平均数,注意超参数这里是$\beta_2$
接下来进行参数修正,参数修正可以防止在迭代次数较少的时候,计算出来的指数加权平均数较小
最后更新参数
- $\beta_1$常用的缺省值是0.9
- $\beta_2$ Adam的发明者推荐使用的数值是0.999
- $\epsilon$的取值没有那么重要,Adam论文的作者建议为$\epsilon=10^{−8}$
- 在实际使用中,$\beta_1,\beta_2,\epsilon$都是使用的推荐的缺省值,需要调整的是学习率$\alpha$
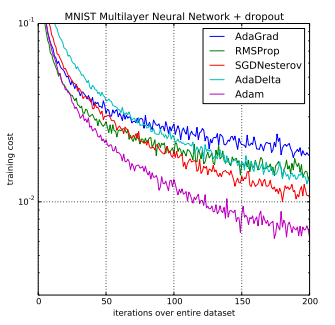
这是Adam 优化算法和其他优化算法在多层感知机模型中的对比,可见其收敛的速度较快,效果明显,并且Adam 算法很容易实现,有很高的计算效率和较低的内存需求。